
|
|
|
作者J. Sluka
http://www.inpharmix.com/jps/PID_Controller_For_Lego_Mindstorms_Robots.html
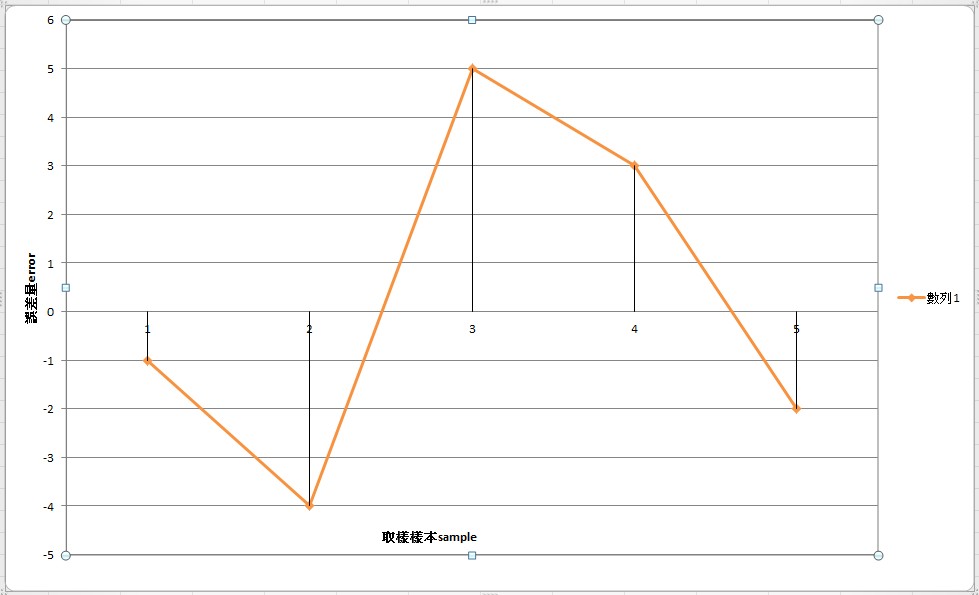
圖一
圖二
圖三
圖四
圖五
| Ziegler–Nichols method giving K’ values (loop times considered to be constant and equal to dT) | ||||
| Control Type | Kp | Ki’ | Kd’ | |
| P | 0.50Kc | 0 | 0 | |
| PI | 0.45Kc | 1.2KpdT/ Pc | 0 | |
| PID | 0.60Kc | 2KpdT / Pc | KpPc / (8dT) | |
| 提高變數的影響 | ||||
| 變數 | 上升時間 | 過衝時間 | 穩定時間 | 不穩定誤差 |
| Kp | 下降 | 上升 | 小變化 | 下降 |
| Ki | 下降 | 上升 | 上升 | 消除 |
| Kd | 小變化 | 下降 | 下降 | 無 |
| 歡迎光臨 魚骨頭的雲端圖書館 (http://mhfo.hotbbs.info/) | Powered by Discuz! 7.0.0 |

 新浪微博
新浪微博 QQ空间
QQ空间 人人网
人人网 腾讯微博
腾讯微博 Facebook
Facebook Google+
Google+ Plurk
Plurk Twitter
Twitter Line
Line